自主移动机器人
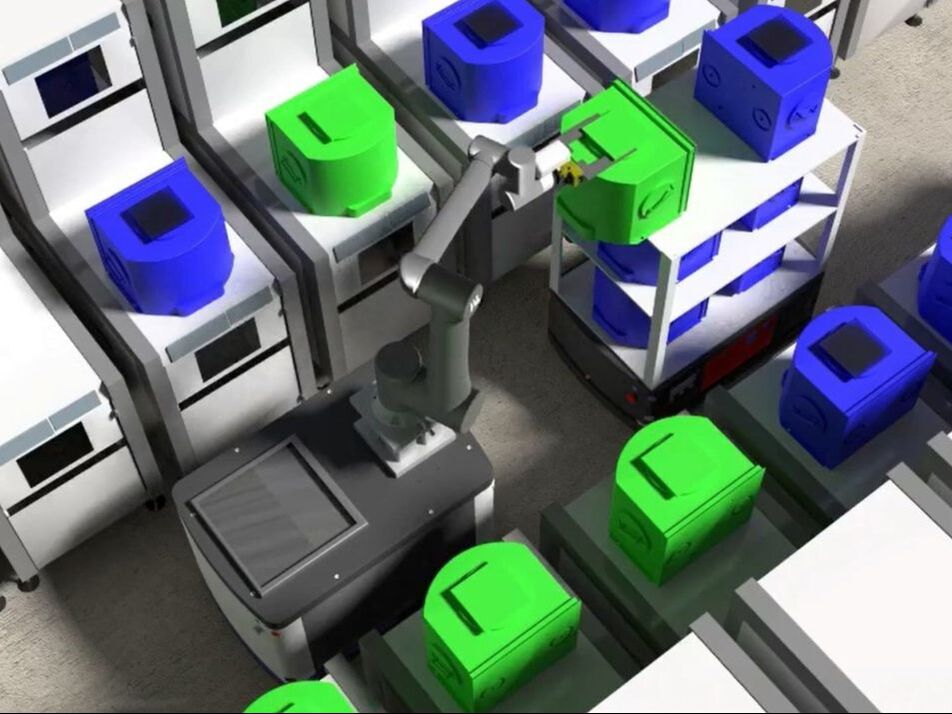
先构技研整合无人搬运车(AGV)与机器人(Robot),推出自主移动机器人(AMR-Autonomous Mobile Robot),自主移动机器人具有自主、灵活运用的特点。
自主移动机器人MR-T12/VT6之底盘系统为无人搬运车MR150,可承载70kg工件,采用SLAM导航系统,可于电脑进行编程教导。而MR-T12为达明机器人,手臂荷重为12kg,内建视觉系统,整合视觉软硬体,透过简易操作的人机介面,直接用手拉动或是平板电脑教导,操作介面非常方便简单,而感测器于机器人与周边产生碰撞时,会自动停止使机器人更加的安全。MR-VT6则搭配EPSON工业机器人,具有高精度、高速度等特点,可轻松整合相关周边。
自主移动机器人MR-T12/VT6之底盘系统为无人搬运车MR150,可承载70kg工件,采用SLAM导航系统,可于电脑进行编程教导。而MR-T12为达明机器人,手臂荷重为12kg,内建视觉系统,整合视觉软硬体,透过简易操作的人机介面,直接用手拉动或是平板电脑教导,操作介面非常方便简单,而感测器于机器人与周边产生碰撞时,会自动停止使机器人更加的安全。MR-VT6则搭配EPSON工业机器人,具有高精度、高速度等特点,可轻松整合相关周边。
产品规格
自主移动机器人MR-T12
车体尺寸1,154mm * 654mm * 700mm
拖运重量70Kg 走行速度Max. 50M/Min 旋转半径600 mm@30M/Min (备注1) 导引方式光学导引 走行模式前进、后退、回转 驱动系统:差速轮 机体重量:230kg 搭载机器人:达明协同型机器人TM12 机器人轴数:6 机器人荷重能力:12kg 视觉及光源系统:内建于达明协同型机器人 电池:锂铁电池( 12V/35Ah*4)。 夹爪:电动夹爪或气动夹爪 选配:自动充电方案 备注1:需视搭载物转弯的搭配条件。 本系统外观及规格先构保有变更之权利。 严禁擅自转载本商品之内容。
|
自主移动机器人MR-VT6

车体尺寸1,154mm * 654mm * 700mm
拖运重量70Kg 走行速度Max. 50M/Min 旋转半径600 mm@30M/Min (备注1) 导引方式光学导引 走行模式前进、后退、回转 驱动系统:差速轮 机体重量:230kg 搭载机器人:EPSON工业型机器人VT6 机器人轴数:6 机器人荷重能力:6kg 视觉及光源系统:外挂选配 电池:锂铁电池( 12V/35Ah*4)。 夹爪:电动夹爪或气动夹爪 选配:自动充电方案 备注1:需视搭载物转弯的搭配条件。 本系统外观及规格先构保有变更之权利。 严禁擅自转载本商品之内容。 | ||||
产品特点
|
|
|
|
应用情境
|
|
|
|
产业应用

半导体产业应用
移动机器人可进行POD/FOUP的搬运作业,节省线上作业人力,借此提升产品产能。 |

加工产业应用
移动机器人可应用于不同加工机台间的物料传递,可以弹性对应车床、铣床等不同的设备。 |

医疗产品应用
移动机器人可进行临床服务及医疗器材搬运,实现人机混合,使得制程更加的稳定。 |
自主移动机器人(AMR)导入流程

需求调查针对搬运频率、产品特性、作业流程、周转频率、品质重点进行资料的调查与收集,并且确认客户需求与投资年限。
|
数位提案进行自主移动机器人(AMR)的规划与系统模拟,计算所需要的自主移动机器人(AMR)数量与周边,然后以3D的方式的进行提案说明。
|
规格制订进行自主移动机器人(AMR)系统的导入需求讨论与规格收敛,其中包含单机、布线、车控中心,确认交货与验收规范后,制作规格议定书。
|
报价成交提供报价单后,再次检讨规格与价格后,达成交易条件,明确订单成立。
|

设计制作进行周边设备的设计、加工、制作、组装后,进行自主移动器人(AMR)与周边设备的程式撰写与教导后进行交货。
|